





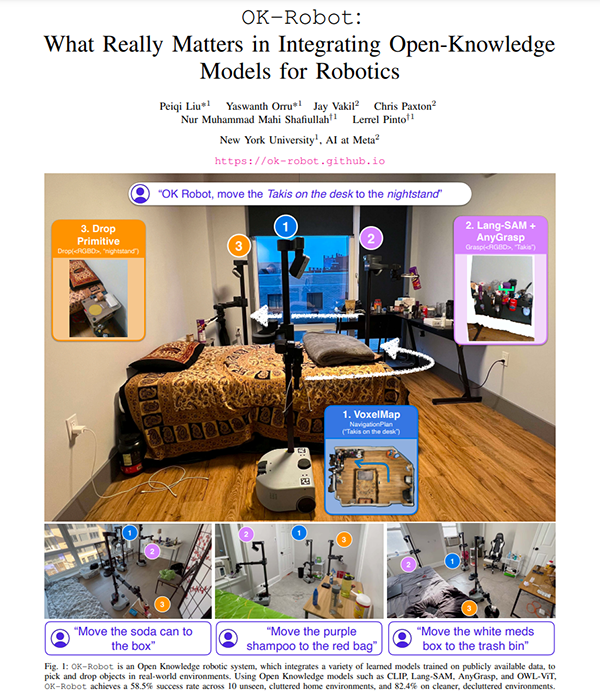
[ICRAW 2024] OK-Robot: What Really Matters in Integrating Open-Knowledge Models for Robotics
| Author | Peiqi Liu, Yaswanth Orru, Jay Vakil, Chris Paxton, Nur Muhammad Mahi Shafiullah, Lerrel Pinto |
| Venue | First Workshop on Vision-Language Models for Navigation and Manipulation at ICRA 2024 |
| Code | GitHub Repository |
1. Method
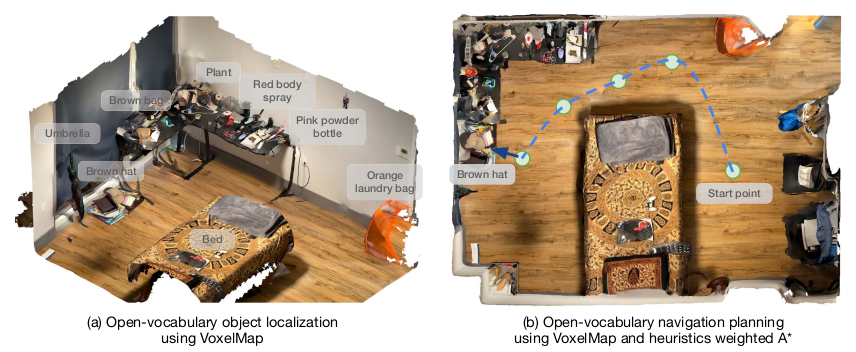
A. Object-centric Sematinc Memory (VoxelMap)
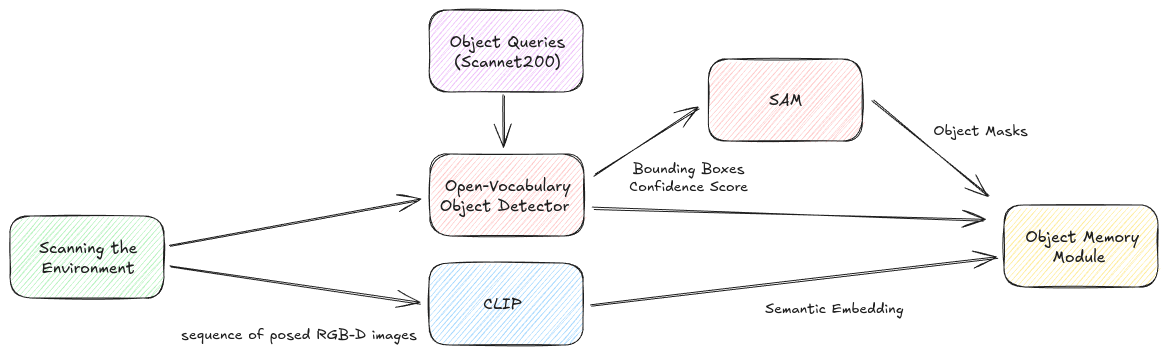
본 논문에서 제안하는 open-vocabulary object navigation 방식은 CLIP-Fields의 접근법을 따르며, 사전 매핑 단계(pre-mapping phase)에서 환경을 스캔하는 과정을 포함한다. 이 과정에서 수집된 RGB-D 이미지, 카메라의 자세(pose) 및 위치(position) 정보가 맵 구축 모듈로 입력된다.
모든 프레임에서 open-vocabulary object detector를 실행하여 객체의 바운딩 박스를 검출하고, 이를 Segment Anything Model (SAM) 을 사용하여 객체 마스크로 변환한다. 이때 객체 탐지를 위한 자연어 쿼리(object queries) 입력은 Scannet200 데이터셋의 라벨을 기반으로 구축된 대규모 객체 쿼리 세트를 활용한다. 이와 함께 CLIP 임베딩을 생성한다.
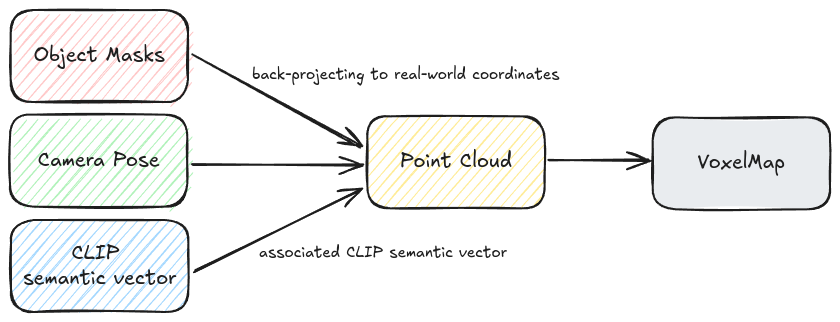
이후, Depth 이미지와 카메라의 포즈 정보를 사용하여 객체 마스크를 실제 월드 좌표계(real-world coordinate)로 역투영(back-projecting)한다. 그 결과, CLIP semantic vector와 연관된 포인트 클라우드가 생성된다. 생성된 포인트 클라우드는 일정 해상도로 복셀화(voxelize)되며, 각 voxel 내의 CLIP 임베딩 값을 검출 신뢰도(detector confidence)기반 가중 평균(weighted average)으로 계산하여 최종 VoxelMap을 구축한다. 이 VoxelMap은 객체 메모리(object memory)의 기반을 형성하며, 객체 탐색 및 내비게이션을 위한 핵심 요소로 활용된다.
B. Querying the memory module
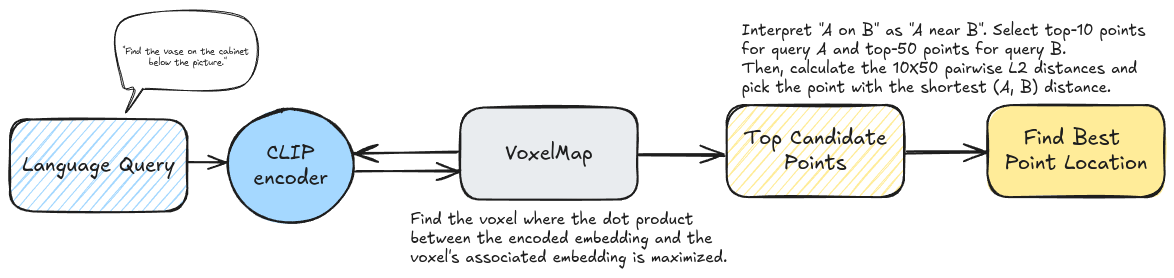
주어진 언어 쿼리(language query)는 CLIP 언어 인코더를 사용하여 semantic vector로 변환된다. 변환된 semantic vector와 각 복셀에 저장된 semantic vector 간 내적(dot product)를 계산하여, 내적 값이 최대가 되는 복셀을 찾는다. 이 과정은 쿼리한 객체가 존재할 가능성이 가장 높은 위치를 찾는 것을 의미한다.
언어 쿼리를 처리할 때 “A on B” 형태의 관계형 쿼리를 “A near B”로 해석하는 접근 방식을 채택하고 있다. 이 과정에서는:
- 쿼리 A에 대해 가장 가능성이 높은 10개의 복셀을 선택하고
- 쿼리 B에 대해 가장 가능성이 높은 50개의 복셀을 선택한 뒤,
- 이 10×50개의 복셀 간 L2 거리(pairwise L2 distance)를 계산, 가장 짧은 (A,B) 거리 값을 갖는 A 위치를 최종 선택한다.
이러한 방식은 기존 연구들에 비해 더 낮은 해상도의 맵으로도 객체 검색이 가능하고, 맵을 생성한 후 객체가 약간 이동하더라도 대응할 수 있다는 장점을 갖는다.
C. Navigating to objects in the real world
구축된 VoxelMap을 2D Obstacle Map으로 변환하며, 이 과정에서 바닥과 천장의 높이를 설정한다. 그 다음 바닥과 천장 사이에 차지된 복셀 부피가 있으면 해당 그리드 셀은 장애물이 있는 것으로 간주하여 “non-navigable”로 표시한다. 또한, 바닥과 천장에 해당하는 복셀이 없는 경우에는 해당 그리드 셀은 “unexplored”로 간주되며 역시 “non-navigable”로 표시한다. 추가적으로, 로봇의 크기와 회전 반경을 고려하여 각 차지된 포인트 주변의 20cm 반경 내의 모든 포인트도 “non-navigable”로 표시한다.
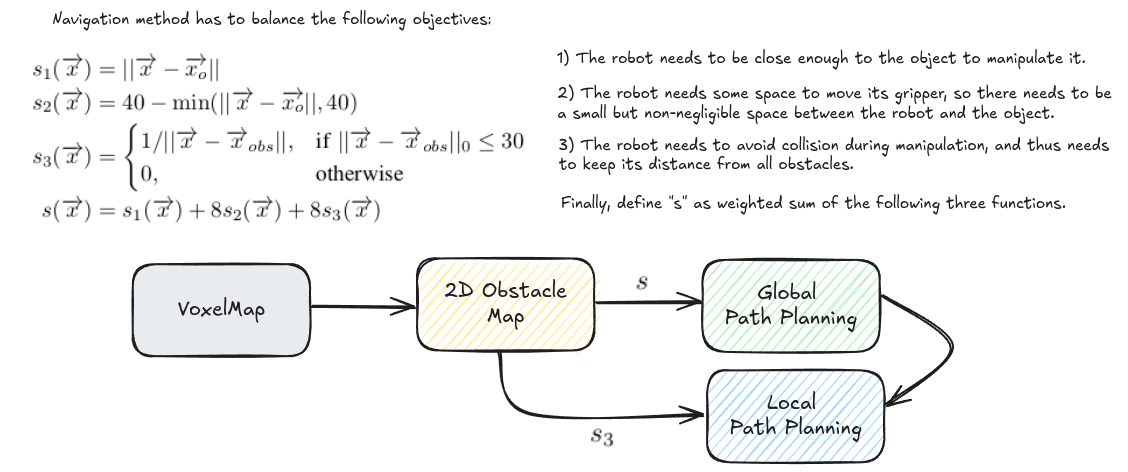
A* 알고리즘을 사용하여 전역 경로(Global Path)와 지역 경로(Local Path)를 탐색하는데, 이를 위해 세 가지 주요 목표를 균형 있게 고려해야 한다.
- 로봇은 물체를 조작할 수 있을 만큼 충분히 가까워야함
- 로봇의 그리퍼가 물체를 조작할 수 있도록 물체와 로봇 사이에 일정한 공간이 필요함
- 조작 중 충돌을 피하기 위해 로봇은 장애물과의 거리를 적절히 유지해야 함
위의 세 가지 목표와 관련된 서로 다른 navigation score function를 평가하여 가장 적절한 도착 위치를 찾는다. A* 알고리즘을 통해 경로를 탐색할 때 세 함수의 가중합으로 정의된 s를 고려하여 전역 경로(Global Path)가 계획이 되고, 이 전역 경로를 따라 이동하는 과정에서 장애물로부터 더 멀리 떨어지도록 하는 s3 함수를 휴리스틱 함수로 사용하여 동적으로 지역 경로(Local Path)가 업데이트 된다.
2. Experiments
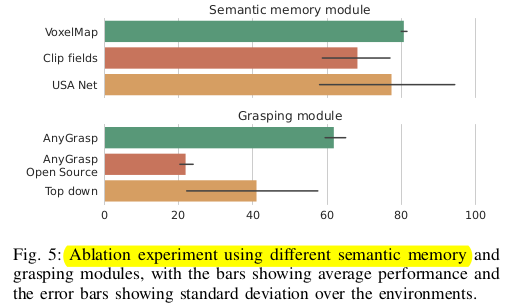
논문의 실험 결과에서 제안된 VoxelMap 기반 방법이 다른 Semantic Memory 모듈과 비교하여 가장 높은 성능을 보였으며, 다양한 환경에서 적은 성능 편차(error variance)를 보이는 것을 통해 일관되게 좋은 성능을 유지함을 확인할 수 있다.
3. Limitations & Requested for Research
본 논문에서 제안한 VoxelMap 기반 open-vocabulary object navigation 방법은 다음과 같은 한계를 갖는다.
-
동적 환경에 대한 대응 부족: 현재의 Semantic Memory 모듈과 Obstacle Map Builder는 환경을 정적(static)으로 표현하므로, 환경 변화에 대해 효율적으로 업데이트하는 방법이 부족하다.
-
시멘틱 쿼리의 애매성(ambiguity): 내비게이션 과정에서 Semantic Query가 애매한 경우, 의도한 객체를 Semantic Memory에서 정확히 검색하지 못하는 문제가 발생한다. 이를 해결하기 위해 사용자와의 상호작용을 통한 쿼리 명확화(query disambiguate) 과정이 필요할 수 있다.
-
모듈 간 오류 누적(multiplicative error accumulation): 시스템 내 개별 모듈의 오류가 누적될 경우 전체 프로세스가 실패할 가능성이 높아진다. 이를 방지하기 위해 더 정교한 오류 감지(error detection) 및 복구(retry) 알고리즘의 도입이 필요하다.